Events and Talks
In AI, Machine Learning and Data Science across the University and beyond.
Events

C2D3 event
In person
The 2026 FENS-Chen Institute Summer Program on AI-Accelerated Neuroscience Discovery and Translation hosted by the University of Cambridge
12 Jul 2026 - 18 Jul 2026

13 Jul 2026 - 17 Jul 2026

Uni of Cambridge
Workshop
In person
Cambridge Ellis Unit Summer School on Probabilistic Machine Learning 2026
13 Jul 2026 - 17 Jul 2026

14 Jul 2026 - 29 Jul 2026

21 Jul 2026

7 Sep 2026 - 11 Sep 2026
Uni of Cambridge
Workshop
In person
Cambridge Social Data School September 2026 : Investigating AI Infrastructure
7 Sep 2026 - 11 Sep 2026

16 Sep 2026

29 Sep 2026 - 30 Sep 2026
14 Jul 2026 - 29 Jul 2026
13 Jul 2026 - 17 Jul 2026
13 Jul 2026 - 17 Jul 2026
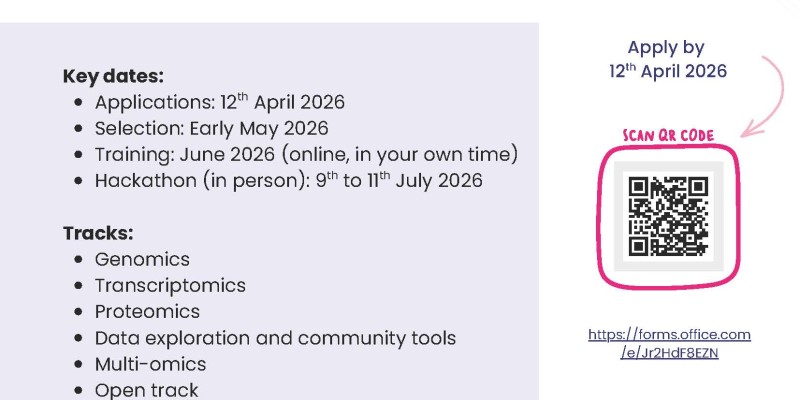
9 Jul 2026 - 11 Jul 2026

6 Jul 2026 - 7 Jul 2026

17 Jun 2026